As the InSight lander finished deploying the HP3 thermal probe on the surface of the red planet, NASA announced the official end of the Mars Exploration Rover mission. Launched more than 15 years ago, this mission included two rovers: Spirit and Opportunity. It was the latter which, after many years of faithful service and extensive travel, ceased to function. Let’s take a moment to look back on this incredible mission that has significantly enhanced our understanding of the red planet, especially its geology.
History
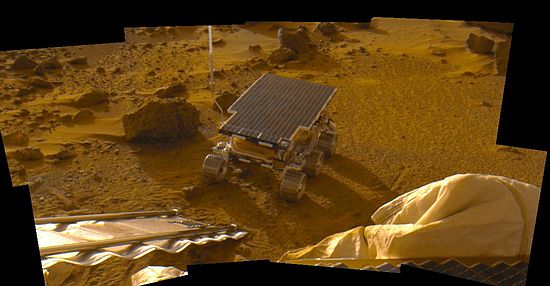
American exploration of Mars began in the 1970s with the very first lander: Viking 1, which landed in 1976. Sixteen years later, NASA launched its most expensive probe at the time for a cost of $813 million: Mars Observer. This probe was supposed to orbit to study the surface, magnetic field, and atmosphere of the planet. “Supposed to” because things did not go as planned: The signal was lost just before Mars orbit insertion, likely due to a leak triggered by the accidental mixing of hypergolic fuels. After this failure, NASA launched its Discovery program, which would include the Messenger probe (to Mercury), Kepler (space telescope), and also Mars Insight. The motto of this new program was “better, faster, cheaper,” implying more probes at lower costs to avoid a failure as significant as Mars Observer. Thus, NASA decided to send an orbiter and a lander to Mars at every launch window, which occurs every two years, under this program. That’s why in 1996, the Mars Pathfinder lander was launched a month after the Mars Global Surveyor orbiter. Pathfinder would deploy the very first rover: Sojourner, which roamed for a few weeks and covered about a hundred meters before ceasing to transmit due to lack of energy.
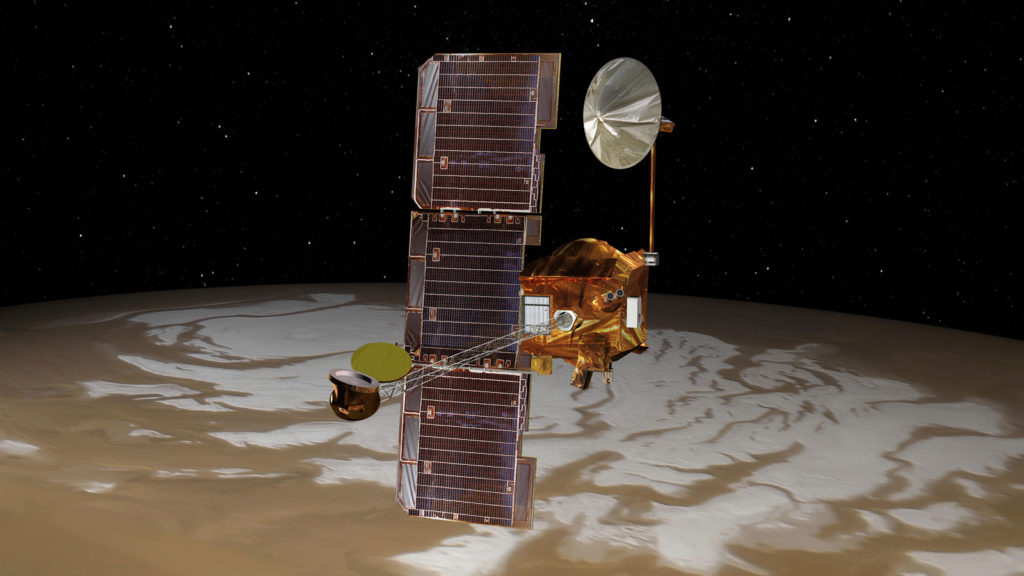
Two years later, the Mars Climate Orbiter was launched, followed by the Mars Polar Lander. However, both missions failed, and NASA decided to stop the dual launches and to reconsider the Discovery program’s motto. This double failure also led to the cancellation of the Mars Surveyor 2001 mission, which was supposed to carry a lander very similar to Phoenix or InSight. Thus, in the early 2000s, the 2001 Mars Odyssey orbiter was launched to study the distribution of minerals on Mars and search for the presence of water. NASA also took this opportunity to change its Martian exploration strategy: it wanted to bring back a sample to better study and understand the interactions between Mars’ atmosphere and water. However, such a mission is very complex, and at the time, no orbiter had a camera powerful enough to find a suitable landing and collection site: It would not be until 2006 and the Mars Reconnaissance Orbiter..
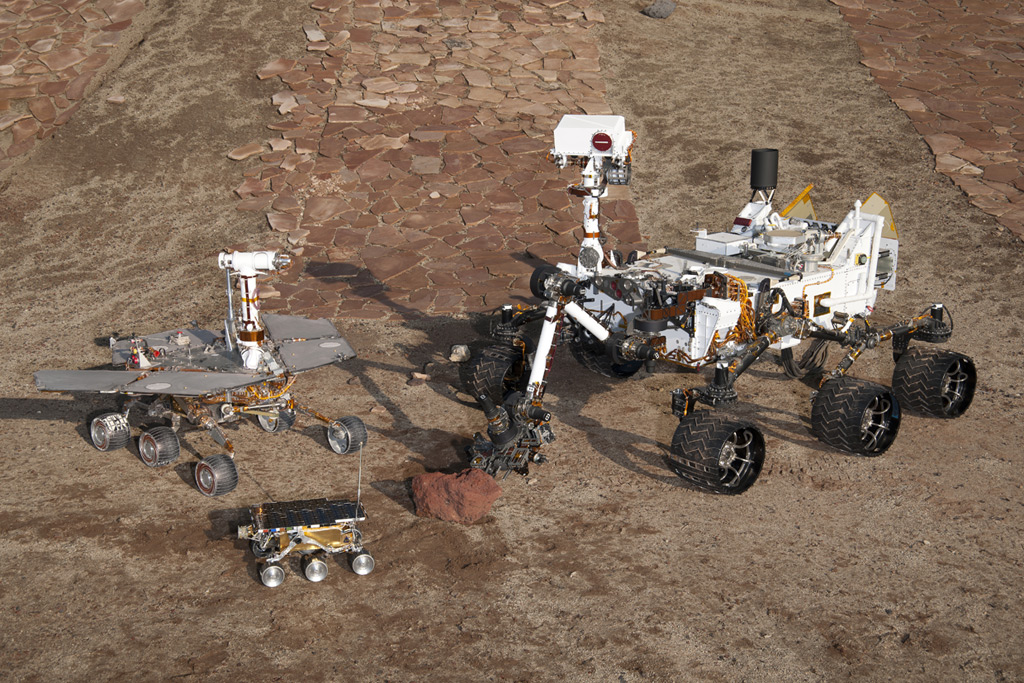
The American space agency thus decides to focus on a geological mission while waiting for this new probe. This mission is intended to explore and analyze Martian rocks and terrain in situ. For this purpose, a rover is essential. It was impossible to adapt Sojourner for such a mission due to its limited autonomy for such an expedition. The Jet Propulsion Laboratory (JPL) proposes to develop a new rover: Mars Exploration Rover (MER). This rover would be much larger than Sojourner, have better autonomy, and be able to carry a larger number of instruments. However, it would remain light enough to use airbags for landing on Mars, as Mars Pathfinder had successfully done. NASA decides to send two MERs to increase the chances of success and ensure the mission’s success. They argue that the cost of manufacturing a second MER is minimal compared to the development cost and that a double success would be a giant leap for scientific results. The entire mission would cost $850 million, the same as for Mars Observer. The launch of the two rovers is scheduled for the next window: in 2003..
The MER rovers are equipped with seven scientific instruments and are expected to travel more than 1km over 90 Martian days (or sols). The objectives of this mission are numerous:
- Search for rocks and soils indicating the past presence of water.
- Determine the distribution and composition of minerals, rocks, and soils around the landing sites.
- Identify the geological processes that led to the formation of these terrains and soils.
- Validate measurements made from orbit to determine the accuracy of orbiter instruments.
- Search for minerals containing iron and those that were formed in water or contain water.
- Determine the texture of the rocks and the characteristics of the minerals.
- Determine if the environments where water was present in liquid form were conducive to life.
The rovers of this mission rely heavily on developments from past missions. The cruise stage is derived from Mars Pathfinder, as are the entry vehicle and the landing module. Some elements have been modified, such as the parachute, which has been enlarged by 40%, or the engines, which are now 90% more powerful.
The general components of the MERs
The two MER probes are rigorously identical. Even though the rovers, which weigh only 185kg each, represent only a small part of the total weight of the probes, these probes remain quite light with a mass of 1063kg. Each probe consists of four major parts: The cruise stage, the entry vehicle, the landing module, and finally, the rover.
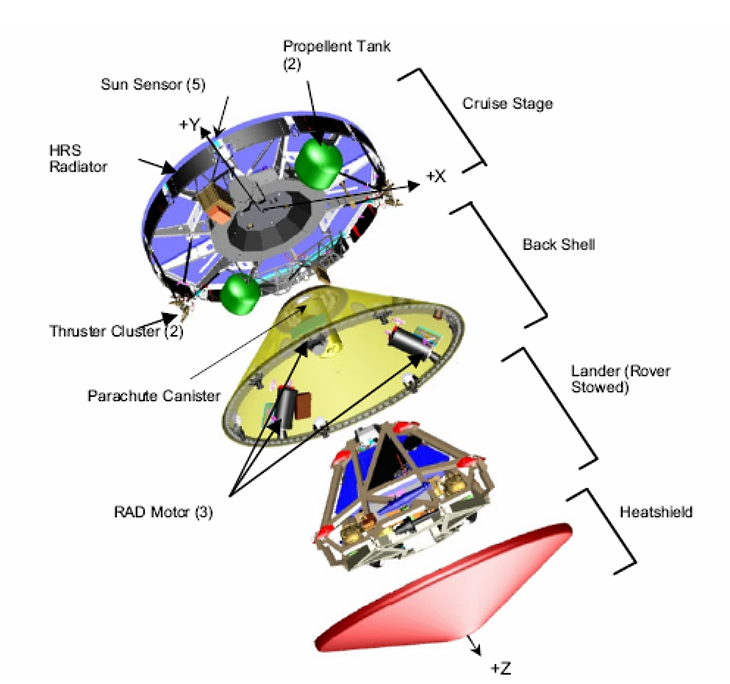
The cruise stage is responsible for delivering the rover to its destination. To do this, it carries 31kg of hydrazine to fuel two clusters of small engines that can make trajectory and/or orientation corrections. It is also equipped with five solar detectors and a star tracker to precisely determine the probe’s attitude. For communication with Earth, the cruise stage carries two antennas, one low-gain and one medium-gain. Both transmit telemetry data and receive commands in X-band. This stage also has a surface area of 4.4m² of solar panels to deliver electrical power of 300 to 600W throughout the journey. This disc, 2.65m in diameter and a few tens of centimeters thick, is also equipped with radiators to keep the systems in acceptable thermal conditions. However, the cruise stage does not have an onboard computer. It is the rover that controls everything during the journey. Once close enough to Mars, this stage becomes unnecessary and is jettisoned.

The second major component of the MER probes is their entry vehicle. Its purpose is to protect them during their high-speed entry (5.5km/s) into the Martian atmosphere. Despite the atmosphere’s thinness, it is still present and necessitates the use of thermal protection (which is not necessary for a landing on the Moon, for example). This entry vehicle can withstand temperatures up to 1500°C (in comparison, steel melts at around 1400°C). To achieve this, it is equipped with a thermal shield at the front weighing only 79kg and made from an ablative material that dissipates heat by slowly burning away. The rear shield, on the other hand, weighs 209kg and has a more conical shape. It is also covered with an ablative material but much thinner since this shield experiences less heat. This part of the entry vehicle also contains the giant supersonic parachute that slows the probe during its entry. It is also equipped with several engines to further slow down the probe before moving to the last stage of entry: landing.

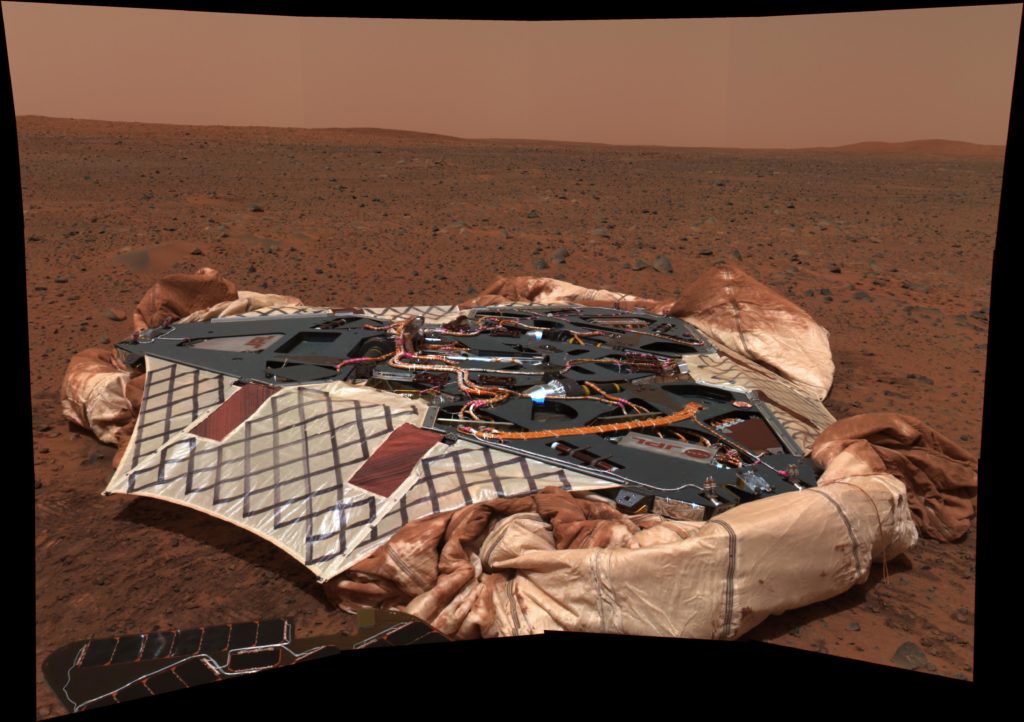
The landing module is responsible for this last critical phase before science operations can begin on the ground. It is released about twenty meters above the ground and has the sole objective of cushioning the impact at the moment of contact with the ground. As with Mars Pathfinder, this cushioning is achieved through a set of airbags. The module has a tetrahedral shape, and each face features a set of 6 inflatable lobes. These are made from vectran, a material even stronger than kevlar. In total, this landing module weighs 348kg.
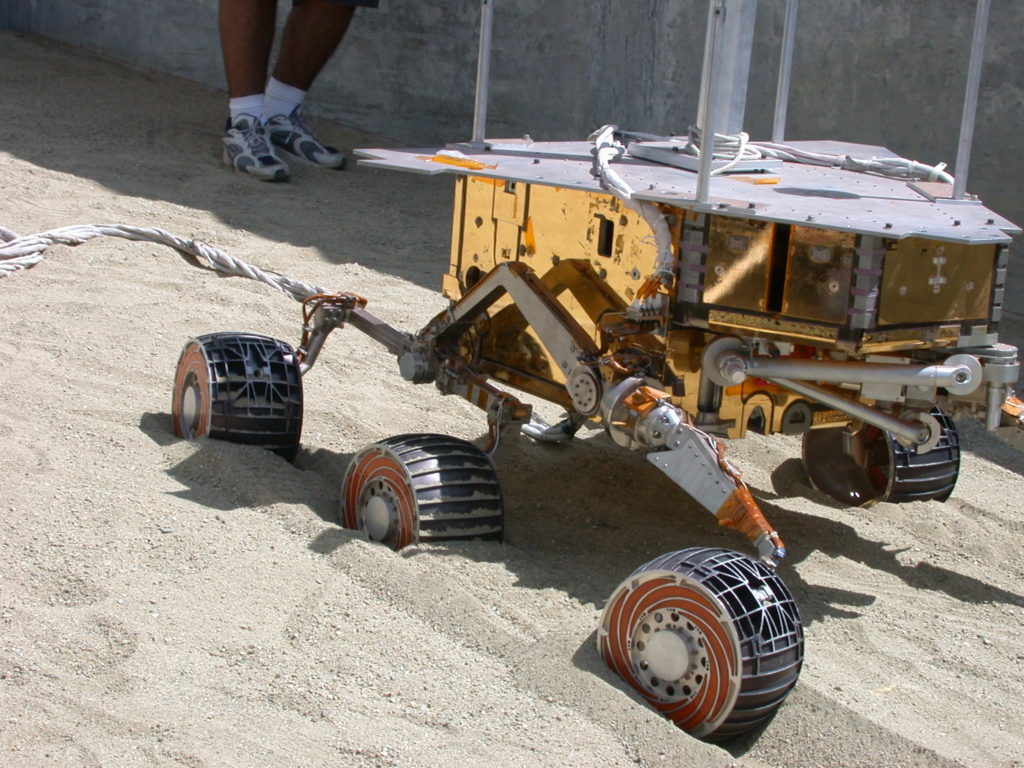
Finally, the most important part of the probe: the rover. Each rover is approximately 1.5m high, 2.3m wide, and 1.6m long. The central body of the rovers is a triangular block that houses components that cannot withstand the extreme thermal conditions of Mars. This includes the onboard computer, the inertial unit (which determines the rover’s orientation), the electronic part of some instruments, the wheel motor control boards, batteries, etc. To regulate temperature, this central body is equipped with several systems. It includes radiators but also passive insulation with silica aerogel and a gold leaf. To combat the cold, engineers decided to place eight pellets, each weighing 2.7g, of plutonium dioxide, a radioactive compound that emits heat. The heat released by the electronics also helps to warm the interior.
For propulsion, the rover uses a set of six wheels. These wheels are mounted on a suspension system developed by NASA and nicknamed rocker-bogie. This system allows it to overcome obstacles over 26cm high, more than the diameter of the wheels. Thanks to its lowered center of mass, the rover is theoretically capable of climbing slopes of 45°, but this angle has been limited to 30° to avoid any problems. Each wheel has its own motor, and the front and rear wheels can pivot to turn the rover. It can reach a speed of 180m per hour, but it does not exceed 133m/h due to the terrain and necessary direction changes.
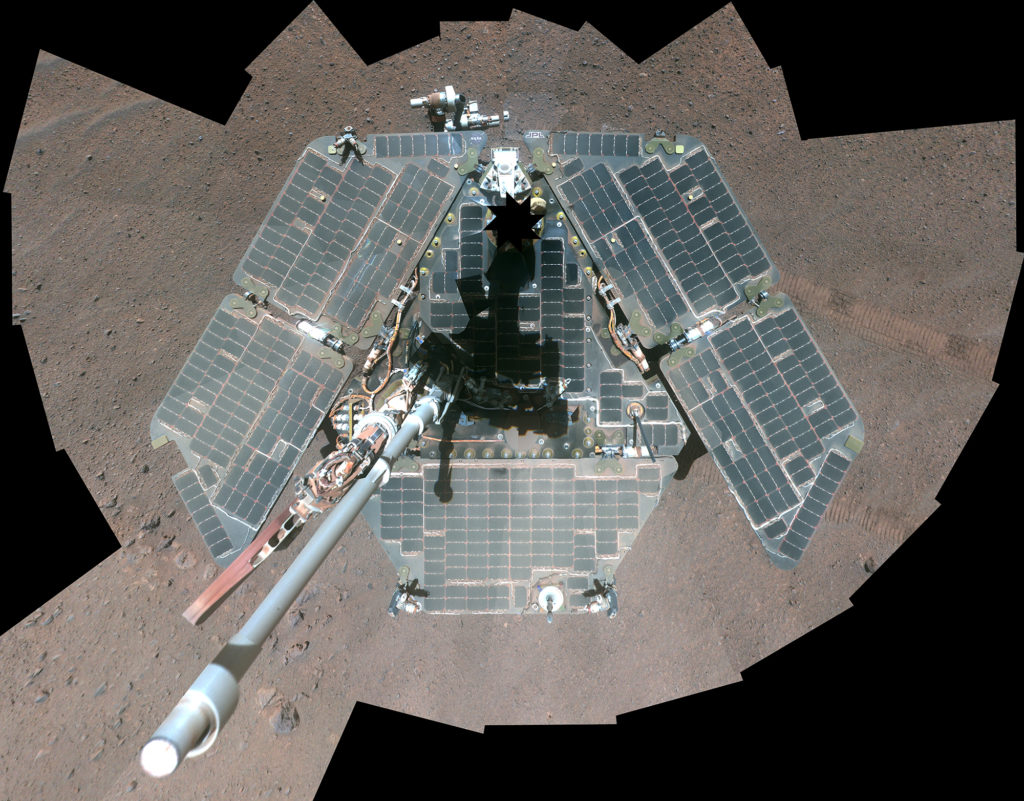
From an electrical standpoint, each rover is powered by solar panels that cover the top of the central body as well as panels that unfold at the back and on the sides after landing. In total, it has a surface area of 1.3m² of photovoltaic cells, which provide up to 200W at best. These panels were chosen due to their excellent efficiency-to-mass ratio (28% efficiency at 2.06kg/m²). At best, each rover can produce 1kWh of energy per day, a quantity that can drop to 200Wh due to accumulated dust or storms. To continue functioning even in the absence of sunlight, each rover carries two 8-cell Li-ion batteries for a storage capacity of 16Ah at 32V per battery. Thus, in the best cases, the rover can operate for four hours non-stop.
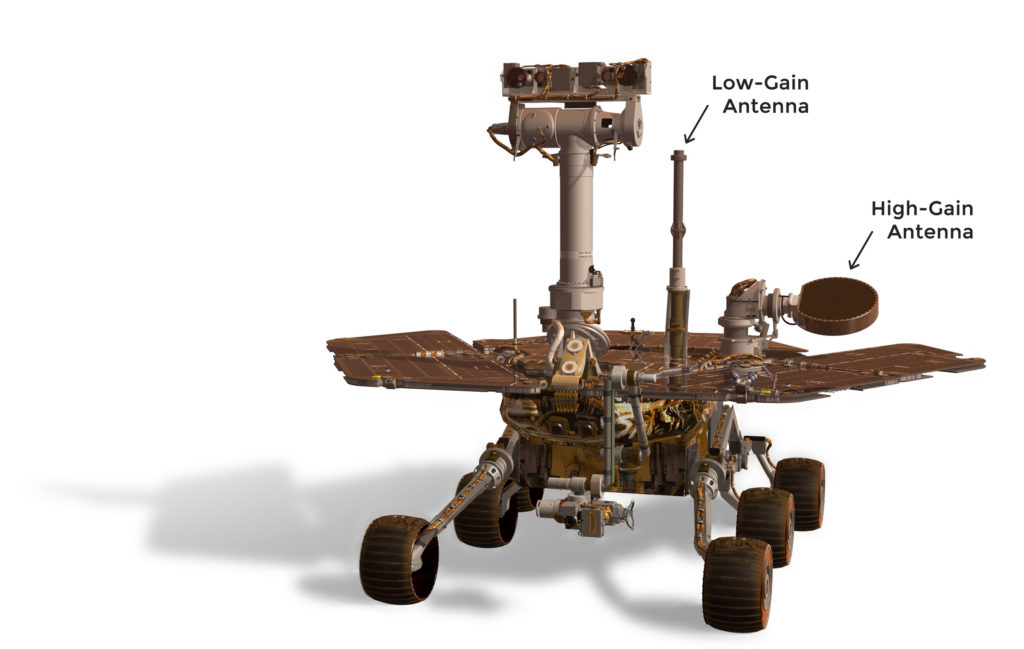
When it comes to communication, the system used by the MER rovers is significantly different from that of Sojourner. Indeed, Sojourner was dependent on its lander and thus could not venture more than 500m away without risking a loss of contact with Earth. Given that the MER rovers are expected to traverse more than 1km, they need to be completely autonomous in terms of communication. They are capable of sending their data directly to orbiters, which act as relays before the data is captured by the giant antennas of the Deep Space Network here on Earth. However, they are also capable of communicating directly with Earth, albeit at a reduced data rate. Each rover is equipped with three antennas:
- A 28cm high-gain parabolic antenna that allows direct communication with Earth in the X-band. It can transmit a large amount of data, but communication times were limited to 3 hours per day to avoid draining the batteries too much. This antenna was added to the rovers to compensate for the abandonment of establishing a communication network in Mars orbit. However, it also necessitated the removal of a scientific instrument (the Raman spectrometer) to avoid excessively increasing the spacecraft’s weight.
- A low-gain omnidirectional antenna that enables the rover to communicate with Earth in the X-band with a very low data rate.
- A UHF (Ultra High Frequency) omnidirectional antenna with a more limited range. This is used to communicate with the orbiting Martian relays (Mars Global Surveyor, Mars Odyssey, and Mars Reconnaissance Orbiter). Communication times last between 5 and 10 minutes depending on the orbiter passing over the rover.
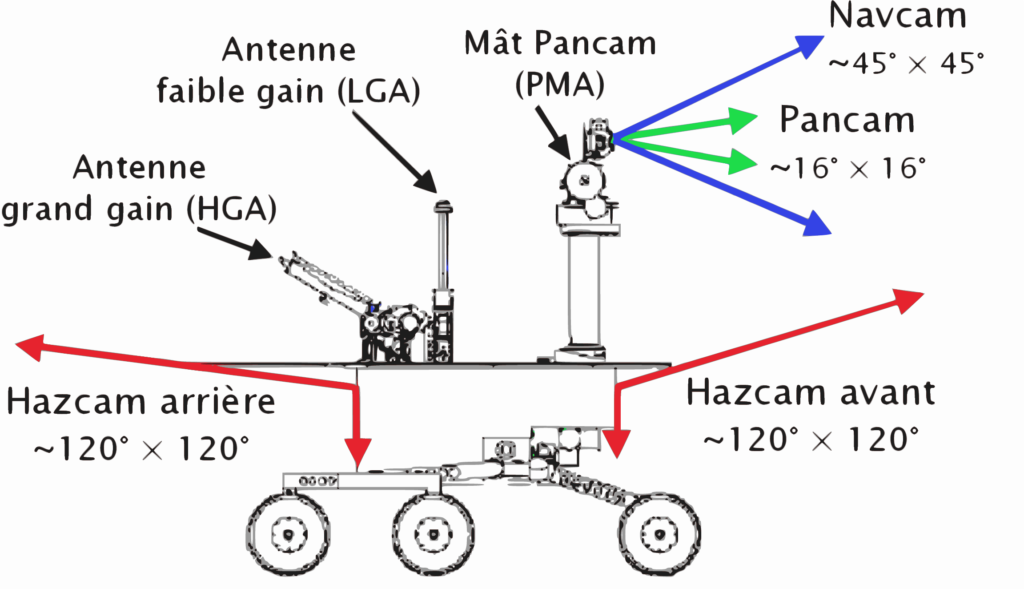
To navigate on Mars, the MER rovers are equipped with a plethora of sensors. They have an inertial measurement unit (IMU) with three accelerometers and three gyroscopes to determine the rover’s orientation. Indeed, the absence of a magnetic field prevents the use of a magnetometer to find North. Sensors also help to warn if the suspension is overloaded or if the rover is in a dangerous situation. Each rover also carries a set of cameras:
- Hazcams (Hazard Avoidance Cameras): Two pairs of monochromatic cameras, one at the front and one at the back, with a wide angle (125°); these are used to detect potential hazards close to the rover.
- Navcam (Navigation Camera): A pair of wide-angle cameras (45°) located at the top of the rover’s mast; these are used for navigation and planning the rover’s path.
- Pancam (Panoramic Camera): A pair of color cameras normally used for scientific purposes but also for navigation with its narrow angle (16°).
With all these instruments, the rovers are capable of detecting obstacles in their path and adjusting their trajectory accordingly. This sophisticated suite of navigation tools enables the rovers to autonomously navigate the challenging Martian terrain, making scientific discoveries and conducting experiments as they go.
The scientific instruments carried by the MER
Each MER rover carries a total of 7 instruments to successfully carry out its scientific mission:
Pancam: This dual camera system is located at the top of the rovers’ mast. It can point in any direction to closely examine the rocks along the path of the MER rovers. Each of the two cameras is equipped with a 1024-pixel by 1024-pixel CCD sensor. Thanks to the two cameras, it is possible to create three-dimensional images of the rocks, which is very useful for geologists. The Pancam also features a set of filters: eight filters mounted on a wheel for imaging at different wavelengths, two solar filters for studying the absorption of dust particles in the Martian atmosphere, filters for studying the infrared spectrum with the right camera, and filters for studying the visible spectrum with the left camera.

Mini-TES: This spectrometer, mounted at the top of the mast next to the Pancam, is used to study the mineral composition of rocks and soils. It does so by measuring the naturally emitted infrared radiation from the surfaces.
APXS (Alpha Particle X-ray Spectrometer): The Alpha Particle X-ray Spectrometer instrument is located at the end of the rover’s robotic arm. The purpose of this experiment is to study the abundance of chemical elements present in rocks. To do this, a radioactive source of Curium-244 bombards the sample to be studied with alpha particles and X-rays. The spectrometer then analyzes the X-rays and alpha particles emitted by the elements in the sample. This instrument was developed by the Max Planck Institute for Chemistry in Mainz, Germany.
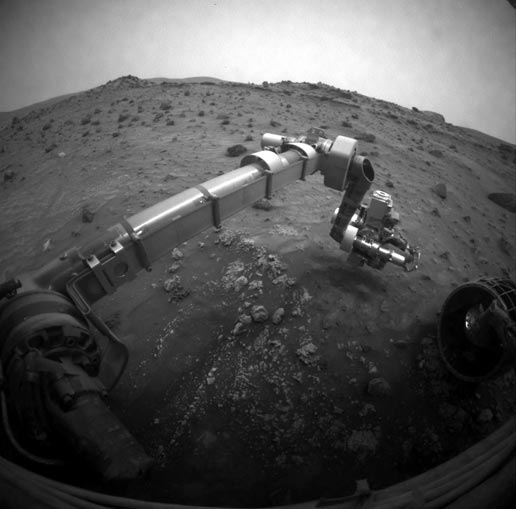
MIMOS II (Mössbauer Spectrometer): Developed at the Johannes Gutenberg University in the same city as APXS, this Mössbauer spectrometer uses a gamma-ray beam to conduct a precise study of the mineralogy of rocks. Like APXS, it is also placed on the rovers’ robotic arms.
RAT (Rock Abrasion Tool): This tool has a simple purpose – to remove dust and surface coatings from rocks to enable better measurements by the other MER instruments. RAT is a 4.5cm diameter grindstone made of diamond chips and can clean the rock to a depth of 5mm.
Microscopic Imager: Positioned on the robotic arm, this microscope provides impressive images of the ground with a resolution of 20 to 40µm per pixel.
Magnetic Particle Trap: A set of 7 magnets has been placed on the body of the MER rovers. This allows magnetic particles suspended in the Martian atmosphere to adhere to them. They are then studied by MIMOS II, APXS, or the Microscopic Imager.
The mission of Spirit and Opportunity
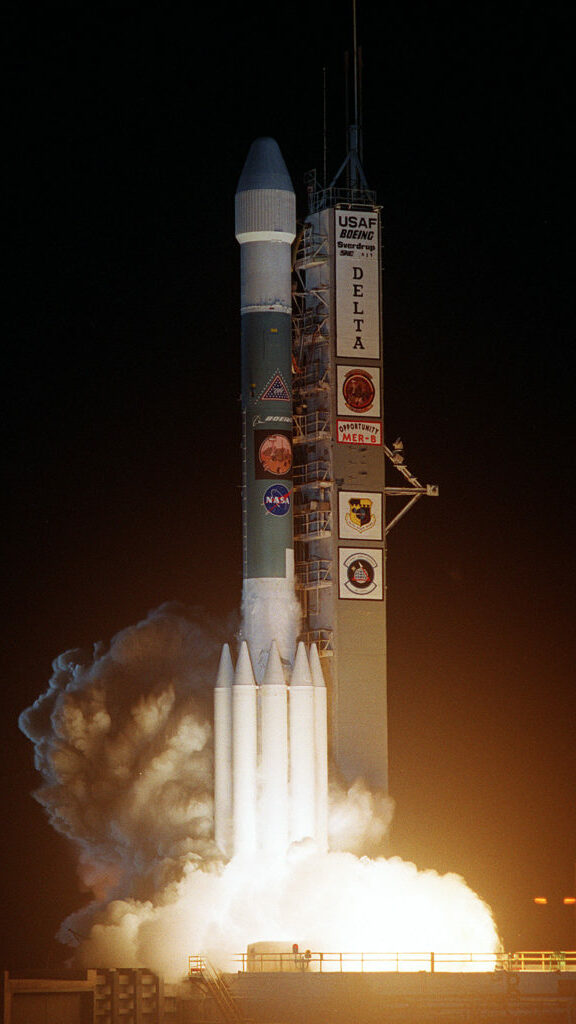
The two MER rovers were initially referred to as MER-A and MER-B. MER-A was later renamed Spirit, and MER-B was renamed Opportunity. Spirit was launched on June 10, 2003, from Cape Canaveral’s Launch Complex 17A aboard a Delta II 7925 rocket. Opportunity was launched four weeks later on July 7, from Launch Complex 17B aboard a Delta II 7925H rocket. Due to the slight delay, the power required for the transfer to Mars increased significantly, necessitating the use of the heavier variant of the launcher. This version replaced the GEM-40 boosters with slightly larger GEM-46 boosters, providing greater thrust. These launchers were also equipped with an additional stage, Star48B, to provide the necessary propulsion for the journey.
The Earth-to-Mars transit took about six months during which the rovers traveled more than 500 million kilometers. During this journey, five course correction maneuvers were performed. The last one was optional but allowed for greater precision in choosing the landing site. During this phase, the precise position of the rovers was measured using the time it took for radio waves to reach Earth. As for velocity, it was determined using the Doppler effect and a technique called DDOR (Differential Doppler One-way Ranging) specifically developed for the mission, which aimed to simultaneously measure the position of the rover and the position of a quasar using two Earth-based antennas.
After these six months of transit, the rovers entered the Martian atmosphere at a speed of 5.5 km/s. Initially, the aeroshell (vehicle of entry, descent, and landing) slowed down the rovers as atmospheric friction reduced their velocity by a factor of 15. Subsequently, a parachute was deployed while the rovers were still moving at 1.77 times the speed of sound, further reducing their velocity by a factor of 7. At this point, their velocity was less than 50 m/s. Next, the airbags inflated, and the parachute was jettisoned. Retro rockets then took over and completely nullified the module’s velocity at a height of about twenty meters above the surface, where the module was released. The airbags cushioned the final impact, and once the entire assembly had stopped bouncing and rolling, the airbags deflated and retracted. All of these events occurred on January 3, 2004, for Spirit, which landed in Gusev Crater at 15° south of the equator, and on January 24, 2004, for Opportunity, which touched down on Meridiani Planum, almost at the equator.
Opportunity’s journey was even more impressive! It began by exploring Eagle Crater, where it had landed. Here, it identified rocks that had been detected by Mars Global Surveyor and contained gray hematite, a mineral often formed in the presence of water. Opportunity found numerous pieces of evidence indicating the past presence of water in this location. In the same year, the rover headed towards Endurance Crater, which was about 750m away. It reached the crater in late April 2004 and studied its rims. Scientists on Earth made the decision to send Opportunity into the crater. The rover spent 180 days inside before successfully climbing out in December 2004, despite engineers’ concerns.
Starting in 2005, Opportunity began its journey towards Victoria Crater, which was 9km away. During the trip, Opportunity encountered the heat shield that had protected it during entry before being jettisoned. It was also during this journey that, on March 20, 2005, Opportunity set the record for the farthest distance traveled in a single day on Mars: 200m. In late April, the rover became stuck in a sand dune, but unlike Spirit, it managed to free itself by driving in reverse. The robotic arm experienced its first malfunction during this time, and following a second one in 2008, engineers had to keep the arm deployed permanently.

After this extended sleep, Spirit was awakened, but its stuck wheel still wouldn’t move. It continued to move in reverse, and this handicapped behavior eventually presented an advantage. The immobile wheel removed the surface dust layer to reveal an unusual mixture of silica and gold in proportions not typically found. Even more astonishing, this material only forms in the presence of water! In December 2008, Spirit was directed toward the geological formations known as Goddard and Von Braun. Unfortunately, in May 2009, the rover’s wheels became stuck in a patch of fine sand. JPL engineers tried everything to free it but to no avail. Spirit eventually went silent for good in March, and NASA officially ended all communication in May 2011. The rover had greatly exceeded its initial expectations by traveling seven times the planned distance and operating for 20 times longer than anticipated!
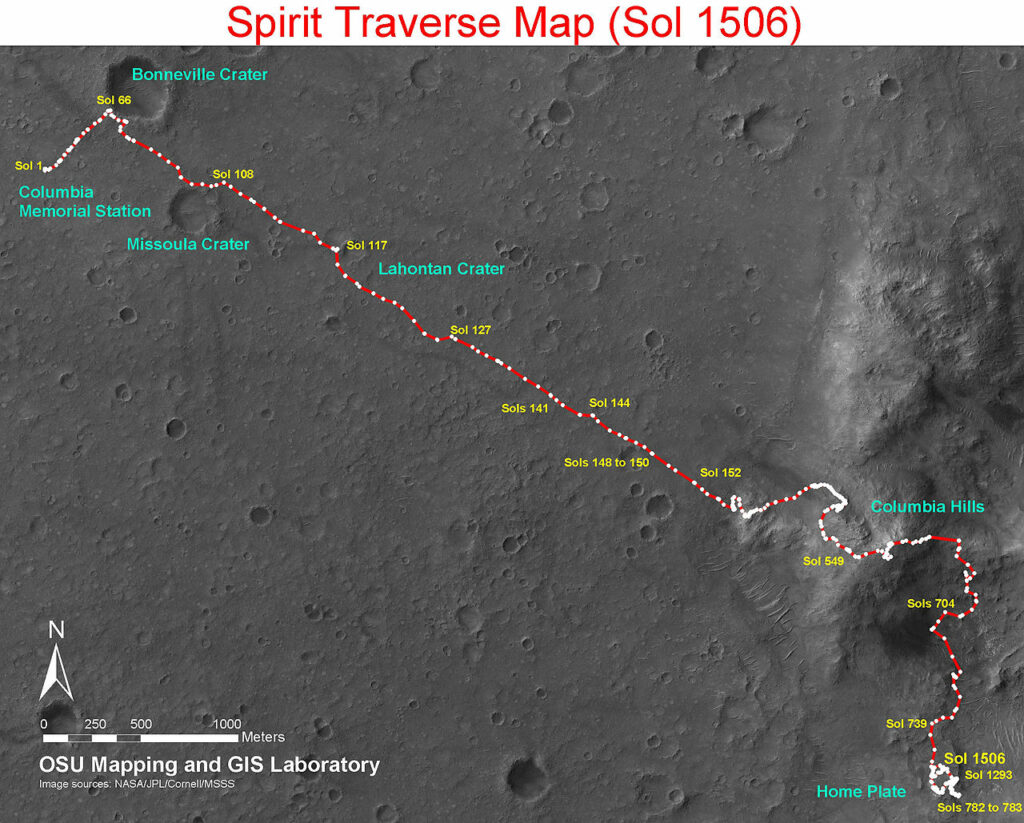
Spirit’s journey over more than 7 years. Credit : NASA
Opportunity’s journey was even more impressive! It began by exploring the Eagle Crater, where it had landed. Here, it identified rocks detected by Mars Global Surveyor that contained gray hematite, a mineral often formed in the presence of water. Opportunity found numerous pieces of evidence indicating the past presence of water at this location. In the same year, the rover headed towards the Endurance Crater, about 750 meters away. It reached the crater’s edge in late April 2004 and studied its surroundings. Ground-based scientists made the bold decision to send Opportunity into the crater, where it spent 180 days before successfully exiting in December 2004, despite initial concerns from engineers.
Starting in 2005, Opportunity embarked on its journey to the Victoria Crater, located 9 kilometers away. During its trip, Opportunity encountered the heat shield that had protected it during entry before being jettisoned. It was also during this journey that, on March 20, 2005, Opportunity set the Mars record for the farthest distance traveled in a single day: 200 meters. Towards the end of April, the rover became stuck in a sand dune, but unlike Spirit, it managed to free itself by reversing. The robotic arm experienced an initial malfunction, which, along with a second one in 2008, forced engineers to keep the arm deployed at all times.

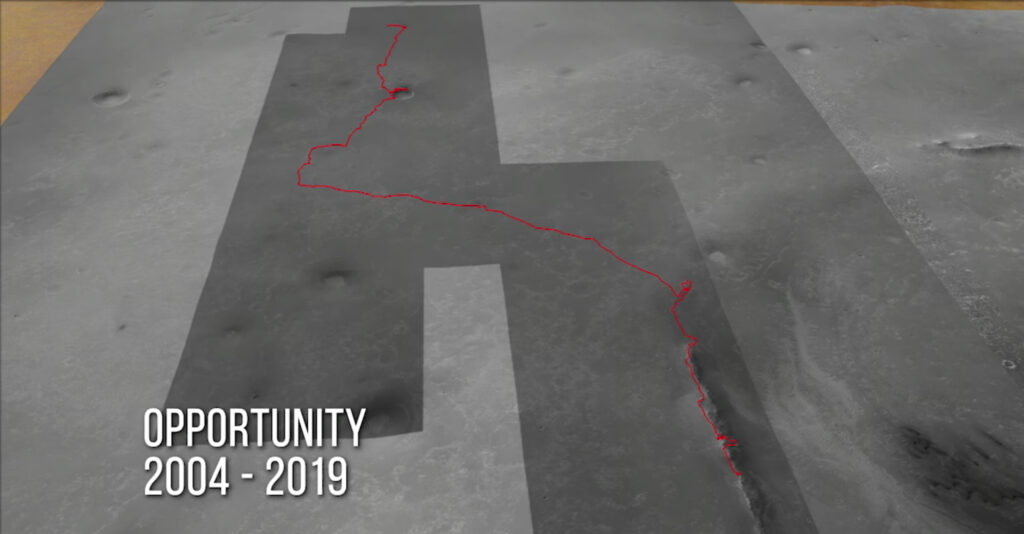
In late September 2006, Opportunity reached the Victoria Crater. The rover was immobilized for several months in 2007 due to dust storms that covered its solar panels. Ultimately, Opportunity left the crater in September 2008 and headed towards the Endeavour Crater, which it reached in 2011. By June 2010, Opportunity had already traveled 21.4 kilometers since its landing but was still 12 kilometers away from the Endeavour Crater due to detours necessary to avoid a sandy plain. On August 9, 2011, the rover finally reached the Endeavour Crater and began exploring it.
In the years that followed, almost all of Opportunity’s instruments became non-functional, having exceeded their expected operating lifespan. The cameras became dirty, and the batteries deteriorated. Ultimately, in the middle of 2018, Opportunity ceased to function. Due to a major dust storm that deprived almost the entire surface of Mars of sunlight for several months, the rover’s batteries were almost completely drained. Despite the return of sunlight, the solar panels were never able to recharge the batteries sufficiently to restart Opportunity. Thus, on February 13, 2019, after more than 800 attempted communications, NASA officially announced the end of the Mars Exploration Rover mission. Opportunity had traveled more than 45 kilometers and remains to this day the robot that has explored Mars the most. Its final message was, “My batteries are almost empty, and it’s getting darker here” (slightly embellished compared to what was actually received by Earth antennas).